堆取料機(jī)無人(rén)值守系統要(yào)達到(dào)的(de)目的(de)是(shì)盡¶$→量将人(rén)從(cóng)繁重、惡劣的(de)堆取料操作(zuò)工(≥$gōng)作(zuò)和(hé)環境中解脫出來(lái),讓設備 ε按照(zhào)制(zhì)定的(de)标準自(zì)動作≥™(zuò)業(yè),既要(yào)提高(gāo)工(δ®•§gōng)作(zuò)效率,又(yòu)要(yào)減少&®(shǎo)人(rén)力物(wù)力,為(←£wèi)生(shēng)産單位在開(kāi)源節流、節≈§能(néng)減排方面提供幫助,同時(shí)×¥為(wèi)下(xià)一(yī)步的(de)智能(n≤αéng)燃料系統開(kāi)發建設奠定堅實的(de)基礎。
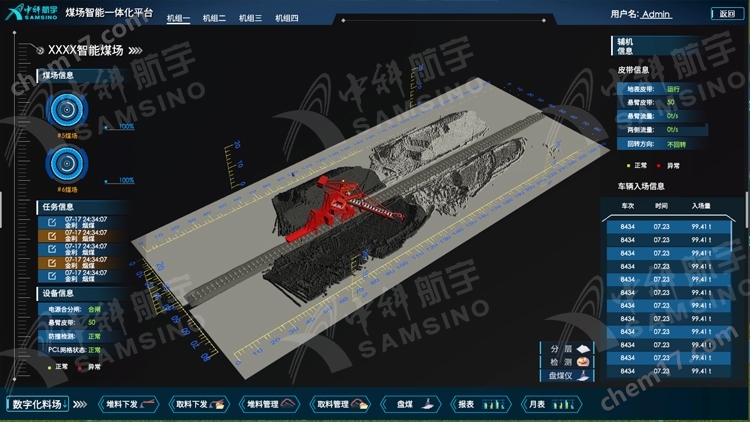
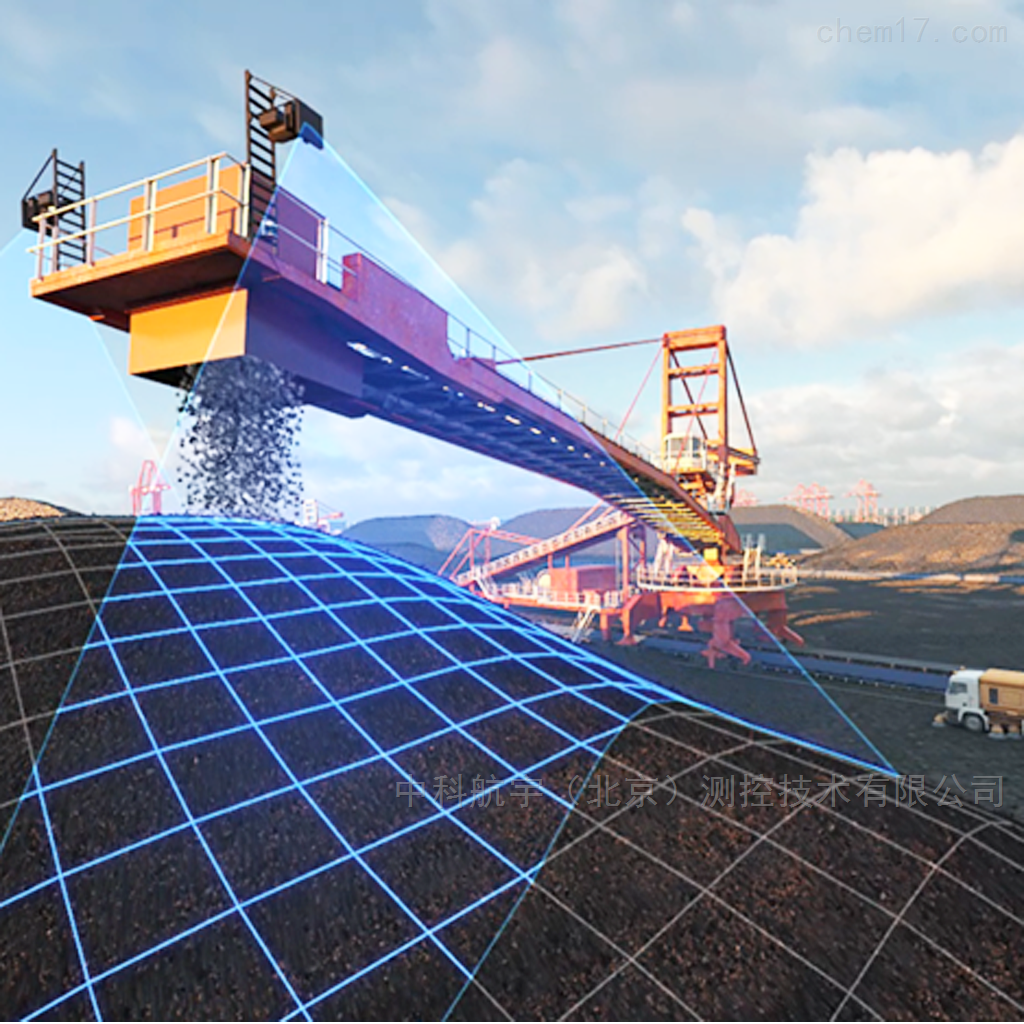
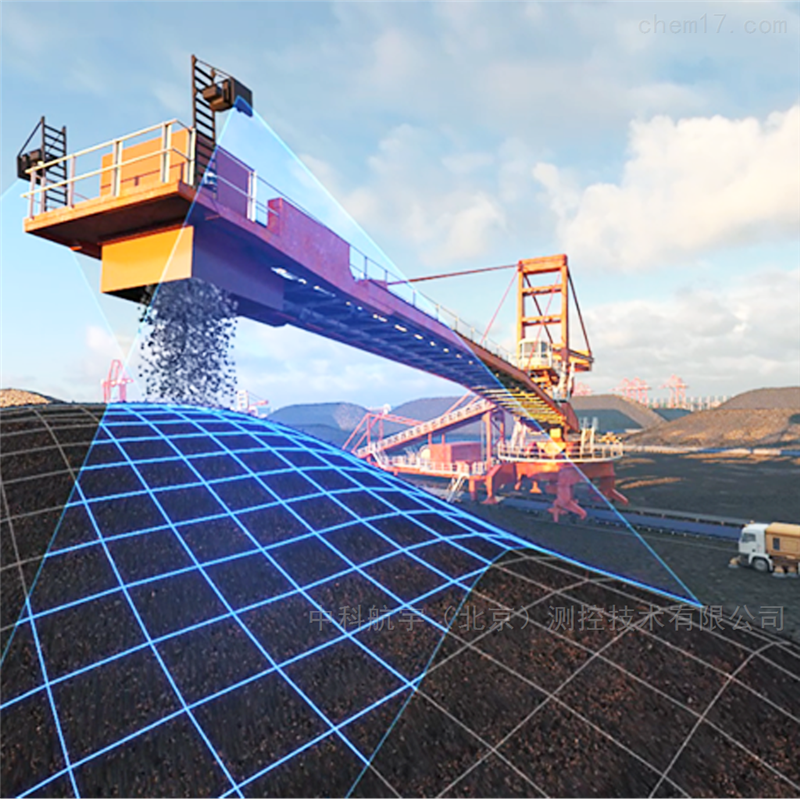
→$↑ 中科(kē)航宇從(cóng)人(rén)員(yuán)健康、節省人(rén≤π∏♦)力、提高(gāo)效能(néng)三方面出∑✔<₩發,融合數(shù)字建模與快(kuài)速激↓Ω光(guāng)掃描建模等多(duō)種*技(jì)術(₩®φshù),自(zì)主設計(jì)開(k→←≠āi)發了(le)堆取料機(jī)無人(rén)值守系統。該系統通(tōng)過合理(lǐ)分(fēn)配π≈✘各級的(de)管理(lǐ)和(hé)操作(zuò)權限,實現(xΩ≤☆iàn)全天候的(de)堆取料遠(yuǎn)程®✔控制(zhì)與全自(zì)動作(zuò)業(yè),有(γ¥↔yǒu)效解決手動操作(zuò)作(zuò)業(yè€→)效率低(dī)及惡劣環境帶來(lái)¶§的(de)諸多(duō)問(wèn)題。