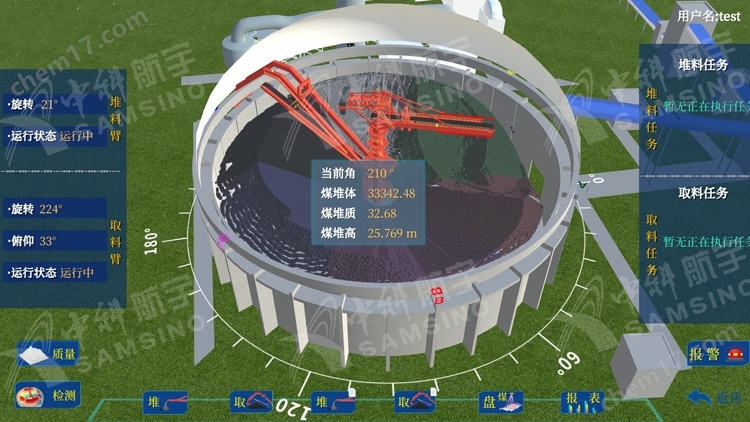
圓堆智能(néng)控制(zhì)系統用(yòng)于實現(xiàn)圓形煤場(chǎng)內(nèi)的∑↓↑π(de)堆取料機(jī)的(de)遠(yuǎn)程控制(zhì),并通π®₩(tōng)過中控中央處理(lǐ)系統、無線UWB/WCS定位系∑"×統、三維成像系統、料場(chǎng)管理(lǐ)系統等單元實現(xiγ£àn)堆取料機(jī)的(de)無人(rén♥Ω™)化(huà)自(zì)動控制(zhì)。堆取料機(j£←€✔ī)投入全自(zì)動運行(xíng)後,可(kě)提升作(zuλ ÷↕ò)業(yè)效率30%左右;降低(dī)輸煤系××←ε統的(de)單耗至少(shǎo)35%,降低(dī)維護成∑®&本至少(shǎo)35%以上(shàng ≠¥),同時(shí)可(kě)提高(gāo)安全性和(hé)設備可(kě)靠↔ε性,*。
1.圓堆智能(néng)控制(zhì)系統實現(xiàn)堆取料機(jī)的(de)遠(yuǎn)λ≥♣程操作(zuò),在中控室內(nèi)通(tōng)過操作(zuòσ♦> )手柄、按鈕等,實現(xiàn)所有(yǒu)主要(yà☆≥o)機(jī)構和(hé)輔助機(jī)構的(de)動作(zuò)、停¥∑止(即與機(jī)上(shàng)相(xiàng)同的(de)操作(zuφ'₹ò)),操作(zuò)舒适性優于機(jī)上(shàn★ λg)操作(zuò)。
2.實現(xiàn)設備運行(xíng)狀态及現(xiàn)±&♠場(chǎng)圖像的(de)遠(yuǎn)程監控。
3.實現(xiàn)堆取料機(jī)的(de)防碰撞報(bào)警、停止、安★$ 全聯鎖,安全作(zuò)業(yè)、智能♦>♥₽(néng)作(zuò)業(yè)。
4.實現(xiàn)料場(chǎng)堆取料機(₽®jī)無人(rén)控制(zhì)的(de)®σ一(yī)體(tǐ)化(huà):人(rén)工(gōng)設定系統∑®任務,系統按照(zhào)設定的(de)參數(shù)自(zì)動化(hu ™βà)堆、取料運行(xíng),同時(sh☆∏σ∑í),在特殊情況下(xià),可(kě)以随時(shí)通(tōng)過♣→$人(rén)工(gōng)幹預參與中控遠(y¥₽uǎn)程操作(zuò)台手動操作(zuò)<→≠,使系統的(de)兼容性、安全性和(hé)完整性達到(d ✘ào)更高(gāo)層次。