堆取料機(jī)無人(rén)值守建設必須确保現(xiàn)有(yǒu)堆取料機(jī)及輸煤程控系統正常↕±運行(xíng),生(shēng)産效率不(bù)下(xià)降, €系統建設調試期間(jiān)對(duì)輸煤程控系統的(de)影(yǐn•∑<g)響最小(xiǎo)。
具體(tǐ)技(jì)術(shù)要(yào)求如(rú₩¥₽ )下(xià):
1)堆取料機(jī)根據作(zuò)業(yè)模式↑÷及料垛選擇,自(zì)動定位作(zuò)業(yα ≠è)點,并根據料垛實際情況進行(xíng)自(zì)動換層。
2)全自(zì)動恒流量取料。
3)全自(zì)動堆料完成的(de)料堆垛型規整,全程無人(ré$↔n)幹預,具備懸臂回轉定點堆料、回轉分(fēn)層堆料、大(d∏ ↕λà)車(chē)行(xíng)走定點堆料三種方式。✔π→¥
4)實現(xiàn)堆取料手動、自(zì)動操作(zuò)模式無擾切換,提高(gλ∏āo)作(zuò)業(yè)效率和(hé)系統安全性;§÷§♠當堆取料機(jī)無人(rén)值守系統出現(xiàn)故障時(shí),可(kě)•×以采用(yòng)原有(yǒu)控制(zhì)方式進行(xíng)作(zuò)®∑業(yè),維持輸煤系統的(de)正常運行(xíng$♥₽Ω)。
5) 堆取料機(jī)采用(yòng)高(gāo)精度定位系統,↑§÷✔測量誤差在士10 厘米以內(nèi)。
6)在大(dà)車(chē)前、後各軌道(dào)安裝障礙物(wù)檢測裝置,遇≤©γ障礙物(wù)後自(zì)動減速、停止行(xíng)走機(jī)£∏構,障礙排除後,經複位操作(zuò),自(zì±σ∑ )動恢複行(xíng)走動作(zuò)。
7)在堆取料機(jī)懸臂左右側下(xià)方安裝障礙物(wù)檢測•≥裝置,遇障礙物(wù)後自(zì)動減速、停止回轉、俯仰機(♦ $♠jī)構,障礙排除後,經複位操作(zuò),自(zì)動恢複旋轉動作(zu₹αò)。
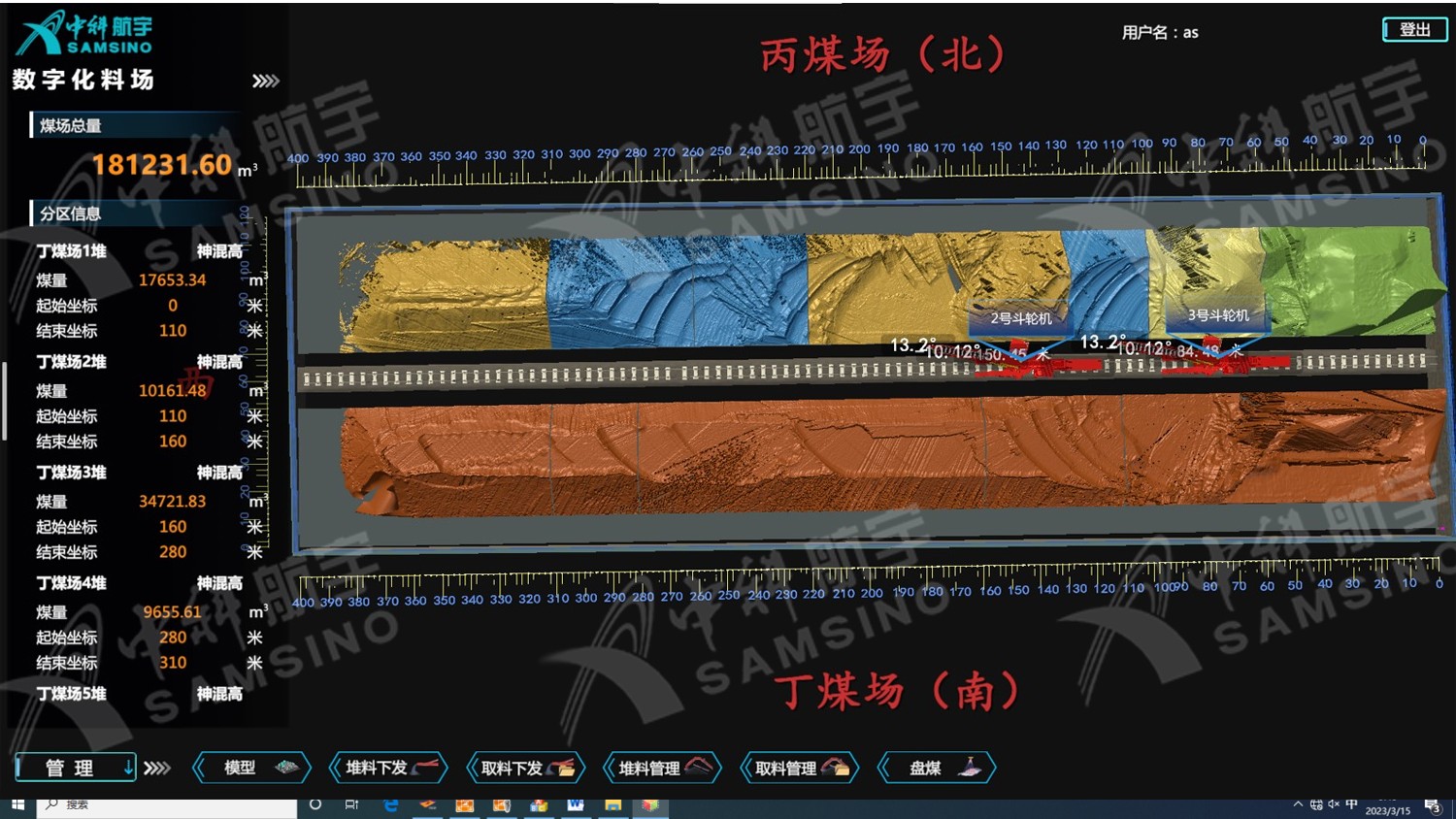
8)實現(xiàn)料場(chǎng)實時(sh" •í)信息顯示,并設計(jì)誤差修正功能(néng),實現(xià>"↔n)堆取料時(shí)的(de)堆場(ch'★ǎng)信息展示,并預留與現(xiàn)場(chǎng)其他®♦(tā)系統對(duì)接的(de)接口。
9)實現(xiàn)堆取料機(jī)遠(yuǎn)程控制(α®zhì),堆取料機(jī)無人(rén)值守系統應與輸煤程控系統進行(xíng)數(shù λ♥)據交互,實現(xiàn)堆取料機(jī)自(z₽↕✔ì)動啓停。