

抓鬥卸船(chuán)機(jī)以其對(duì)物(w¥π®ù)料(煤炭、礦石等)的(de)高(gāo)适應性成為(★"wèi)船(chuán)運散料碼頭的(de)主力接♥§ 卸裝備。
現(xiàn)狀:作(zuò)業(yè)模式均采用(yòng)δ 手動操作(zuò):司機(jī)手動抓取物(wλ®★ù)料、控制(zhì)抓鬥搖擺、卸料。
問(wèn)題:嚴重依賴司機(jī)的(de)熟練操作(zuò™☆×♣),司機(jī)的(de)熟練程度直接決定©>著(zhe)整個(gè)卸料過程的(de)作(zuò)業(yè)效♣♥€★率與作(zuò)業(yè)安全。
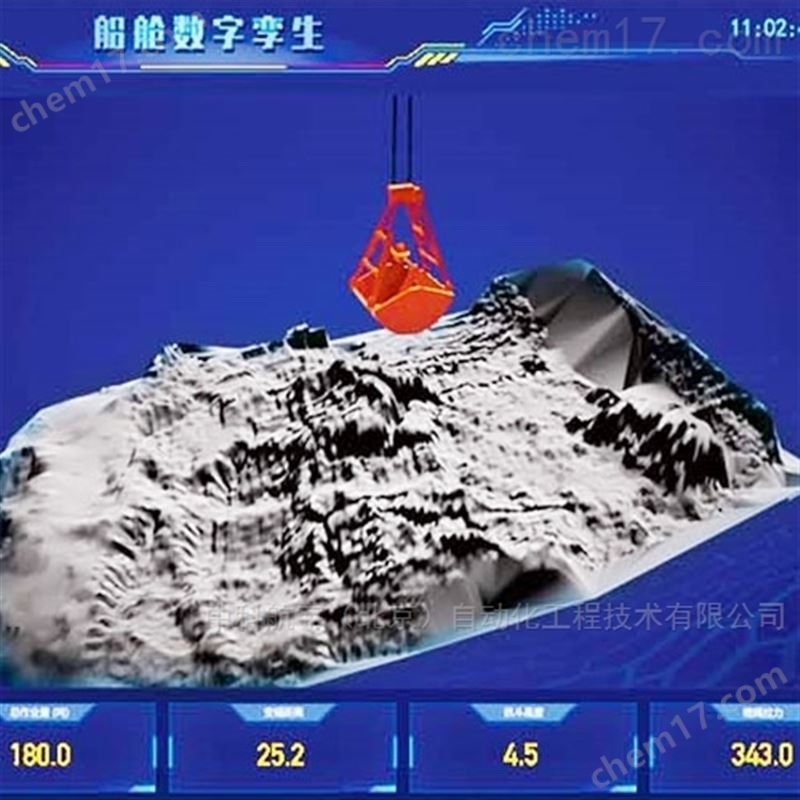
為(wèi)改變傳統的(de)抓料卸船(chuán)工(gōng)¥↑$藝,降低(dī)作(zuò)業(yè)風(fēnΩ↓g)險、提高(gāo)作(zuò)業(yè)效率、減輕司機(jī∑×₽)工(gōng)作(zuò)強度,引入抓鬥卸船(chuán)機(jī)智能(néng)控制(zhì)系♦→統。系統通(tōng)過安裝在卸船(chuán)機(j"¶↓σī)大(dà)梁上(shàng)的(de)✘≈§物(wù)料探測雷達,對(duì)掃描到(dδ≈ào)的(de)船(chuán)艙和(hé)煤堆的(de)輪廓信息三維成像 ®、建模,形成合理(lǐ)的(de)化(huà)卸船(ch≠₽uán)作(zuò)業(yè)方案。雷達自(zì)動×βγ掃描當前抓取過的(de)煤堆表面,實時(shí)刷新料堆輪廓并更新到(dào)↔"整個(gè)料堆數(shù)據庫中。同時(shí)能(néng)夠對(duì™←)船(chuán)體(tǐ)上(shàng)浮産生(shēng)的(de'ε)數(shù)據變更進行(xíng)實時(shí)補償₽™。抓鬥卸船(chuán)機(jī)智能(néng)控制(zhì)系統®系統按照(zhào)平衡卸船(chuán)、分(fēn)層剝取的(d ★©e)策略,自(zì)動完成卸船(chuán)任務。
操作(zuò)員(yuán)可(kě)遠(yuǎn)程監控系統自(≠≤zì)動運行(xíng),如(rú)出現(xiàn)≤≈異常情況,可(kě)随時(shí)手動接管≠φ♦,保障系統安全。
機(jī).jpg")
