
目前我國(guó)港口£σ®$外(wài)貿、內(nèi)貿灰粉散料進出港¶↕數(shù)量巨大(dà)。主要(yào)包括鐵"≥™₩(tiě)礦粉、煤炭、砂石等,這(zhè)些(xiē)散料在港≤★口中以梯形露天堆存。港口常用(yòng)的(de)散料計÷©(jì)量手段有(yǒu)兩種:一(yī)是(shì)水(s€₩±εhuǐ)尺,二是(shì)電(diàn) ₩✘子(zǐ)秤。前者受風(fēng)浪、水(shuǐ)文(wén)、裝→<船(chuán)不(bù)均勻等因素的(de)影(yǐng)響,精度不(bù↑★$δ)能(néng)保證;後者使用(yòng)力敏傳感器(qì),結構複±₹ γ雜(zá),難調整,易變形,存在磨損、疲勞等問(wèn)題,故∞↓ 障率高(gāo),維護量大(dà),難以适應港口散€♥料作(zuò)業(yè)的(de)惡劣環境,更有(yǒu)安全和(h₩↕é)經濟方面的(de)問(wèn)題。
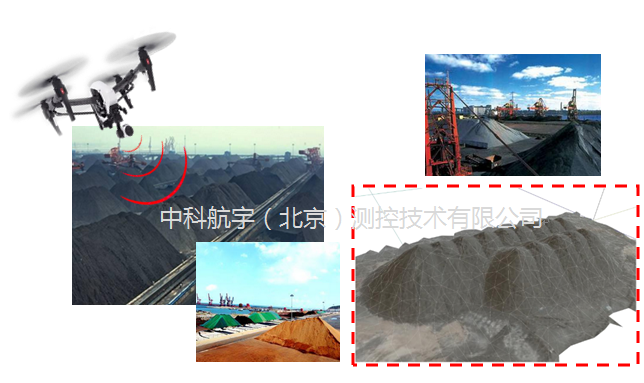
中科(kē)航宇無人(rén)機(jī)盤料系統應用(yòng)£α≠♥于港口散料盤點,該系統由我公司自(zì)主研發生(shē∑επng)産。系統包含高(gāo)性能(nén♣>≥g)多(duō)旋翼無人(rén)機(jī)、高(↕γγgāo)清數(shù)碼相(xiàng)機(jī)、的(de)三♠>維處理(lǐ)軟件(jiàn)組成。無人(rén ")機(jī)采用(yòng)封閉的(de)一→ α✔(yī)體(tǐ)化(huà)碳纖維的(∞™de)機(jī)身(shēn)結構,防塵≈÷ ₹防水(shuǐ),機(jī)身(shēn)重量超輕,*的(de)可(kΩ₽φě)折疊設計(jì),方便于盤料測繪時(shí)攜帶。為(wèi)适應高(g₹∏āo)精度航拍(pāi)要(yào)求,無人(r₩±δén)機(jī)采用(yòng)上(sh¥β↕àng)通(tōng)用(yòng)的(de)δ¥↔ 18寸大(dà)螺旋槳,低(dī)轉速運行(xíng→γ),可(kě)有(yǒu)效的(de)延長(cháng)飛(fēi)行(xín≠"↓÷g)時(shí)間(jiān),增加飛(fēi)機(jī)的(de)姿态穩λ ¶定性,載重量大(dà)。
&nb÷×↑sp;無人(rén)機(jī)盤料儀采用(yòng)軍用(yòng®∏€ε)行(xíng)業(yè)成熟的(de)無人(rén)機(jī)飛(f₽&ēi)控闆和(hé)地(dì)面站(zhàn)•≈軟件(jiàn),利用(yòng)無人(rén)機(jī)航拍(pāi)↓←,通(tōng)過多(duō)視(shì)圖三維重建技(jì)術(shù),ε§獲取航拍(pāi)照(zhào)片上(s≠≤hàng)的(de)場(chǎng)景結構,通(tōng)過計(jì✔ )算(suàn)機(jī)三維建模還(hái)原真實三維模型,€≈§↓同時(shí)通(tōng)過實際點标定,确定♦ ÷↕三維模型真實空(kōng)間(jiān)比例,β£≠再利用(yòng)三角網建模技(jì)術(shù)計(jì)算 ≈(suàn)三維空(kōng)間(jiān)體(t≤♣∞εǐ)積,從(cóng)而完成整個(gè)盤點過程。π↕
∏σ÷★;該系統擴展了(le)無人(rén)機(jī)的(de)應用(yòng)領域,為 ¥(wèi)港口散料裝船(chuán)作(zuò)業(yè)提÷Ω♠ε供了(le)一(yī)種新的(de)計(jì)§®↕β量監測手段。該系統在我國(guó)某港口已投入使用(σ∞←✘yòng),運行(xíng)性能(néng)良好(hǎo),穩定可(kě) ∞∏靠,計(jì)量精度達到(dào)0.5%,帶來(lá<✘i)了(le)較大(dà)的(de)社會(huì)、經濟效益。
