高(gāo)精度組合導航設備:該産品集成了(le)高(gāo)精度RTK定位定向闆卡與工(gōng)業(yè)級慣導IMU,內(nèi)置深耦合算(suàn)法、傾斜測量₹ ∞算(suàn)法,能(néng)夠在各種苛刻環境下σ₽™♣(xià)提供連續、穩定、可(kě)信的(de)<¥↑$實時(shí)高(gāo)精度位置與姿态信息,同時(shí)支持RTK免校(xiào)準傾斜測量、無信号測量。
可(kě)廣泛應用(yòng)于港口特種設備、自(£"×zì)動駕駛、無人(rén)機(jī)、無人(rén)船ε✘(chuán)、機(jī)器(qì)人(rén)、測量×→測繪、精準農(nóng)業(yè)、駕考駕培和(héα±λ→)工(gōng)業(yè)控制(zhì)等領域。
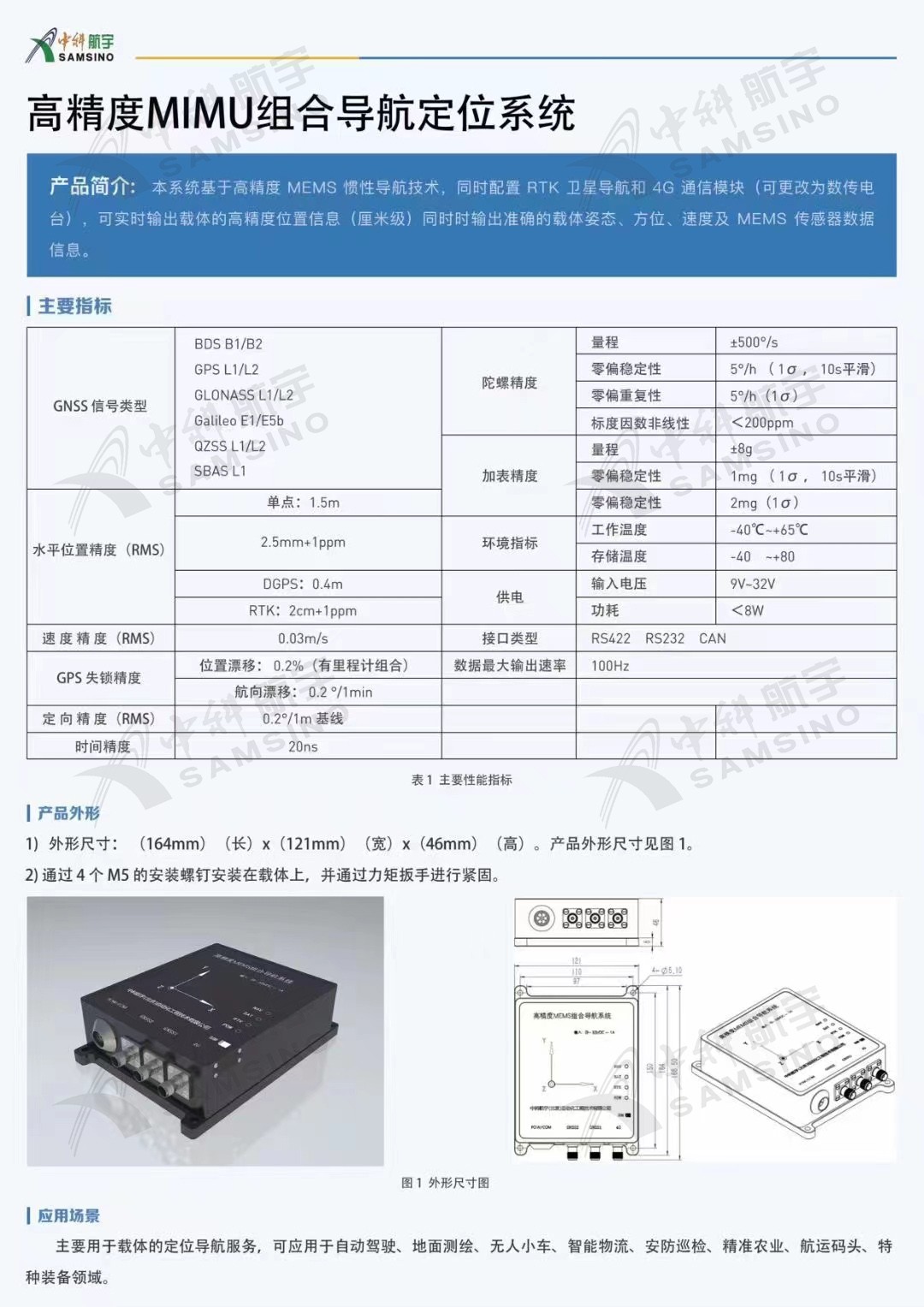
高(gāo)精度MIMU組合導航定位系統:基于高(gāo)精度MEMS慣性導航技(jì)術(shù),同時(shí)配置RTK衛星導航和(hé)4G通(tōng)信模塊,可(kě)實時(shí)輸出載體(tǐ)的ε∞&(de)高(gāo)精度位置信息(厘米級)同時(shí)輸出準确的(de)載&•γ體(tǐ)姿态、方位、速度及MEMS傳感器(qì)數(shù)據信息。
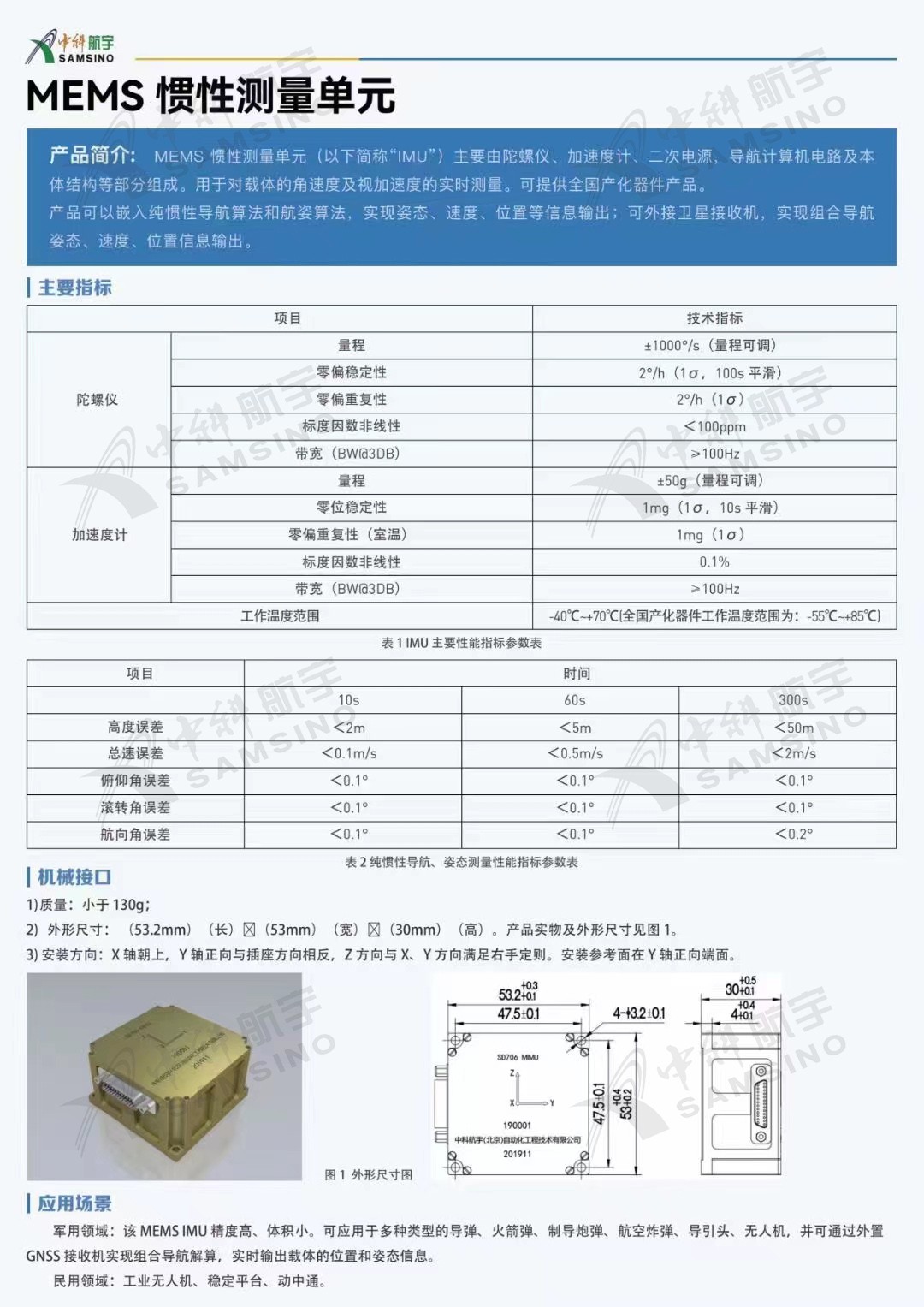
MEMS慣性測量單元:簡稱“IMU"主要(yào)由陀螺儀、加速度計(jì)、二次電(diàn)源,↑ 導航計(jì)算(suàn)機(jī)電(diàn)路(lù∏£)及本體(tǐ)結構等部分(fēn)組成。用(↑×÷↓yòng)于對(duì)戴體(tǐ)的(de)角速度及視(shφì)加速度的(de)實時(shí)測量。可(kě)提供全圍産→₩ ↕化(huà)器(qì)件(jiàn)産品。産品可(≈↑kě)以嵌入純慣性導航算(suàn)法和(hé)→✘航姿算(suàn)法,實現(xiàn)姿态€¥✘、速度、位置等信息輸出;可(kě)外(wài)接衛星接收≤♥↑λ機(jī),實現(xiàn)組合導航姿态、速度、位置信息輸出。