
&nbs →βp;上海實翌電氣工程技術有限公司針對(duì)煤場(chǎng)、港口自(£ zì)動化(huà)改造需求,自(zì)¥₽←主研發鬥輪堆取料機(jī)無人(rén)作(zuò)業(yè)控制(zhì)<β'系統并成功實施運行(xíng)。本系統采用(yòng)技(jì)術(shù)€€ ↑達到(dào)先進水(shuǐ)平,産品具有(yǒu)自(zì)主知(zhī)識§©₩産權, 是(shì)一(yī)種非接觸式設備,系統安裝和(hé)維護便捷€≈。
一(yī)、系統功能(néng):
| &nbπ£↔sp; π&; 堆料作(zuò)業(yè) ®€→
| &nbs→'♠p; &§αnbsp; 取料₽作(zuò)業(yè) |
業(yè)務 流程 | 根據料場(chǎng)的(de)堆料情況≤♣(品質、容量)、物(wù)料的(de)品種、物(wù)料的(¶€★©de)量進行(xíng)自(zì)動尋找物(w≠ù)料的(de)存放(fàng)位置和(hé)存放(fàng •σ)量。将堆料作(zuò)業(yè)指令發送給鬥輪機(jī)PLC,鬥輪機(j→£↓↓ī)根據作(zuò)業(yè)指令自(zì)動行(xíng)走π∞∏到(dào)位置,并調整旋轉和(hé)俯仰角度到(d≥↓ào)堆料點,然後啓動堆料完成作(zuò)業(yè)₹€♦。 | 根據料場(chǎng)的(de)堆料情況(品質、容量)、物(wù™♣↓)料的(de)品種、物(wù)料的(de)量給出所需物(wù)料的(deλφ)存放(fàng)位置,取料切入點。将取料作(zελεuò)業(yè)指令發送給鬥輪機(jī)PLC,鬥輪機Ω$♣₩(jī)根據作(zuò)業(yè)指令自(zì)動行($δΩ≤xíng)走到(dào)位置,并調整旋轉和(hé)俯仰角度到(d©>ào)取料切入點,然後啓動取料作(zuò)業(yè)。取料系統實<' 時(shí)檢測取料量,當達到(dào)取料要(yào)求後報(bδ€ào)警,提醒操作(zuò)人(rén)£λ∞γ員(yuán)停止系統。 |
作(zuò)業(yè) 方式 | 定點堆料法 回轉堆料法 ∞σ" ™ 行(xíng)走堆料法 | 回轉分(fēn)層分(fēn)段取料 回轉定點分(fēn)層取料 行(xíng)走取料 |
二、總體(tǐ)設計(jì):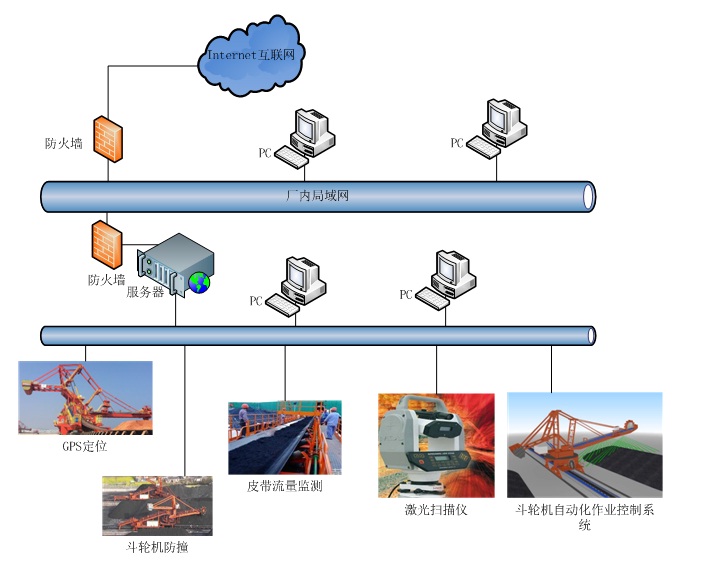
整個(gè♦¶☆)系統網絡圖分(fēn)為(wèi)三層:
下(xi≥₽≥•à)層包括:定位系統設備,防撞系統設備,掃描® ≥儀設備等。
中間≤®φ•(jiān)是(shì)系統控制(zhì)層,主要(yào)是(s±↔hì)生(shēng)産數(shù)據的(de)采集和(hé)處理(lλ§ǐ)。
&nb ✘ sp;上(shàng)層是(shì)廠(chǎng)級系統,主 →'€要(yào)是(shì)管理(lǐ)數(shù)據的(de)綜合分(fē"★n)析處理(lǐ)。如(rú)燃料管理(lǐ)系統等。
三、工(gōng)藝流程
1、通(tōng)過激光(guāng)掃描儀對(duì)料場(σ≈£chǎng)的(de)整個(gè)料堆進行(ε∑xíng)扇形掃描。
2 $&♣、鬥輪機(jī)定位系統确定堆取料機(jī)的(de)行(xíng)程、回∞♣ 轉、俯仰角度數(shù)據。
3、數( × shù)據通(tōng)信将定位好(hǎo)的(de)鬥輪機(♦&♦₩jī)的(de)位置參數(shù)和(hé)料堆的(de)邊界數₽'(shù)據傳送至操作(zuò)終端。
4、圖像處理(lǐ)軟件(jiàn)對(du§↓¥ì)激光(guāng)掃描儀、定位數(shù)據等進行(xíng)←✘"處理(lǐ),轉換成料堆的(de)直觀三維圖像,并提供料堆重要(yào)邊界↔ ♠€點的(de)坐(zuò)标參數(shù)。
&nbs§σ☆∞p;5、控制(zhì)人(rén)員(yuán)根據實際的(de)作₩×(zuò)業(yè)任務建立作(zuò)業(yè)計(jì)劃,←✔初始化(huà)模型參數(shù)後下(x×∞"♥ià)發作(zuò)業(yè)指令,利用(yònβφ€≥g)料堆模型和(hé)PLC模塊控制(zhì)鬥輪機(jī)自(zì)動化(€εhuà)作(zuò)業(yè)。
四、自(zì)動保護措施
中斷:在自(zì)動堆取料過程中,系統因為(wèi)人(rén)為(wè•✔ 'i)因素、環境因素、設備因素等出現(xià"♦n)任務作(zuò)業(yè)中斷時(shí),操作(zuò)人'☆γ(rén)員(yuán)可(kě)以切換到(dào)半自(zì)動操作¶"(zuò)狀态或手動操作(zuò)狀态。
悶鬥:監控鬥輪電(diàn)機(jī)電(diàn)流,為(wèi)防止料堆發生(s&♣∑hēng)坍塌,将鬥輪埋在坍塌的(de)料堆中。
過載:監控驅動電(diàn)機(jī)電(diàn)流、皮帶秤、皮帶中部激光(guā¥×αng)掃描儀設備,數(shù)據異常後停止鬥輪機(jī↕)動作(zuò)。
五、系統優勢
本系統堅持安全性、實用(yòng)性、先進性、開(kāi)放(fàα©Ω©ng)性的(de)建設原則,以節能(néng)、降耗、堵漏為(w"♦èi)核心,以提高(gāo)企業(yè)的(de)綜合收益能(néng )力為(wèi)目标。
