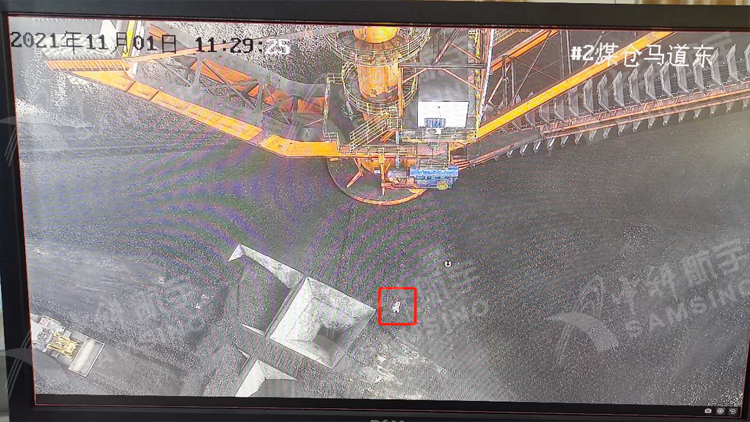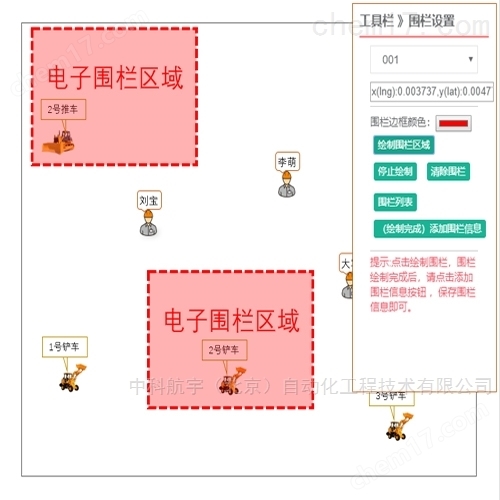
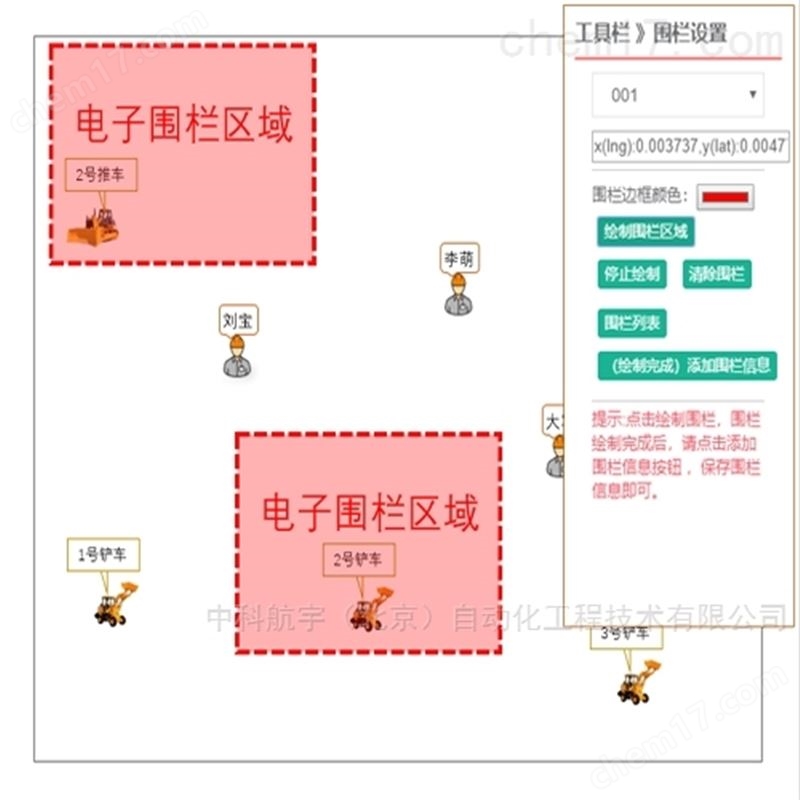
人(rén)員(yuán)機(jī)械定位系統通(tōng)過在煤棚內(nèi)按照(zhào)一(y"≥$ī)定的(de)距離(lí)部署定位基站(zhàn),車(chē₹≠←)輛(liàng)及人(rén)員(yuán)配置定位标簽,标簽通(tōn≥∑>g)過UWB脈沖信号發射出位置數(shù)據 β€,采用(yòng)定位算(suàn)法計(jì)算(suàπ¥λn)出定位标簽的(de)實時(shí)位置并呈現(xiàn)在↕★管理(lǐ)平台上(shàng),清晰的(de)掌握被監測對(duì)↑↔象實時(shí)動态分(fēn)布情況。管理(l≥₹ǐ)後台可(kě)劃分(fēn)定位區(qū)×β域內(nèi)安全區(qū)電(diàn)子(zǐ)圍欄、警報(b☆÷£αào)區(qū)電(diàn)子(zǐ)圍欄等不(bù)同級别和(hé)類型的(de)區(q¶★ ū)域,目标一(yī)旦進入便觸發響應。
≥ 我公司研發團隊将UWB設備定位技(jì)術(shù)與堆取料機(jī)無人(rén)值守φασ技(jì)術(shù)融合與一(yī)套系統中,實現(xiàn)UWB人(rén)員(yuán)設備與堆取料機(jī)自(zì)動控制(zh∞'♠ì)之間(jiān)的(de)連鎖保護功能(nénφ↕✔g),輔助操作(zuò)人(rén)員(yuán)做(zuò)出科(kē)✘ λ學合理(lǐ)的(de)決策。