一(yī)、背景介紹:
&n≤₹bsp;在火(huǒ)力發電(diàn)廠(chǎng)中,鬥輪堆取料機λ∑>(jī)是(shì)火(huǒ)力發電(diànασ≠™)廠(chǎng)輸煤系統中取煤和(hé)堆 "煤的(de)重要(yào)設備之一(yī)₹π,但(dàn)是(shì),目前在電(diàn)&≤±&廠(chǎng)中,對(duì)鬥輪機(jī)的(de)科(kē)學、精細$←、安全、有(yǒu)效的(de)管理(lǐ)還÷ σ(hái)存在著(zhe)一(yī)些(x↔×iē)問(wèn)題。
1、鬥輪機(jī)定位差
2、鬥輪機(jī)管控程序落後
3、制(zhì)約數(shù)字化(huà)煤場(₽α∞chǎng)功能(néng)
二、系統方案:
$↓π中科(kē)航宇(北(běi)京)測控技(jì)術(shù)有(yǒu)∑¶&限公司通(tōng)過鬥輪機(jī)無線定位技(jì)術↔∞(shù),結合一(yī)套完善的(de)鬥輪機(jī)管理(lǐ±☆&φ)系統可(kě)以方便的(de)解決以上(shàng)問(wèn∑♥£₹)題。
1、鬥輪機(jī)的(de)定位。
&nφ×bsp;鬥輪機(jī)無線定位技(jì)術(shù)的(de)主要(yào☆¶)設備不(bù)在鬥輪機(jī)主體(tǐ)上(shà© πng),信号不(bù)通(tōng)過線纜傳輸,δλ≥不(bù)受大(dà)型電(diàn)氣設備影(yǐng)響,同€ ™時(shí)定位精度在10厘米以內(nèi),定位精度高(gāo)。
2、實現(xiàn)輸煤集控室和(hé)鬥輪機(jī₽→)的(de)遠(yuǎn)程通(tōng)訊,形成&l♥£←↓dquo;堆取料作(zuò)業(yè)單:下(xià)↓♣÷達—執行(xíng)—監督反饋—記∞↔€¶錄”的(de)完整管控程序。
鬥•"☆輪機(jī)無線定位技(jì)術(shù®"γ)結合鬥輪機(jī)管理(lǐ)系統實現(x✔>→iàn)了(le)鬥輪機(jī)駕駛室與輸煤程控室之間(jiΩān)的(de)網絡信息交換,避免了(le)通∏"§(tōng)過管控的(de)弊端。輸煤程控室通(tōng)過網§α₩↔絡下(xià)發堆取料作(zuò)業(yè)任務,鬥輪機(•¶♦jī)駕駛人(rén)員(yuán)接收到(d☆"ào)任務作(zuò)業(yè)單後,作(zuò)業≥$(yè)過程通(tōng)過鬥輪機(jī)定位技(jì)術(shù)實時(sh£₩₽í)在輸煤程控室顯示,整個(gè)過程在有(y×£≠ǒu)效的(de)監督下(xià)進行(xíng)。使鬥輪機(jī)堆取料作(φ₩>zuò)業(yè)行(xíng)程“下(xià✔↔β₩)達—執行(xíng)—監₽β"督反饋—記錄”的(de)完整管控程• 序。
3、與計(jì)量及燃料集中管控系統相(xiàng)銜接,完善數(shù)字化®(huà)煤場(chǎng)功能(néng)。
&nbγ≥♥sp;通(tōng)過監控鬥輪機(jī)的(de' )空(kōng)間(jiān)狀态,可(kě)以遠(yuǎn)程γ¶實時(shí)了(le)解當前鬥輪機(jī)在煤場(ch÷∑ǎng)中的(de)相(xiàng)對(duì)位置,為(wèi)即将進↔♥♣↕行(xíng)的(de)工(gōng)作(zuò)提前™™♥做(zuò)準備。根據發電(diàn)要∏₽(yào)求,監管鬥輪機(jī)是(shì)否嚴格§§按照(zhào)堆取任務進行(xíng)準确堆取,保證在煤倉中煤粉混合 ≈均勻,節約資源,提高(gāo)燃燒效率。煤場(c✘βhǎng)中多(duō)台鬥輪機(jī)情況©"₹ 下(xià),如(rú)果駕駛員(yuán)不(bù↓ ★)能(néng)提前發現(xiàn),在中控系統中可(Ω♠♣©kě)以提前預警,保證鬥輪機(jī)的(de)∑×生(shēng)産安全。
三、方案實施:
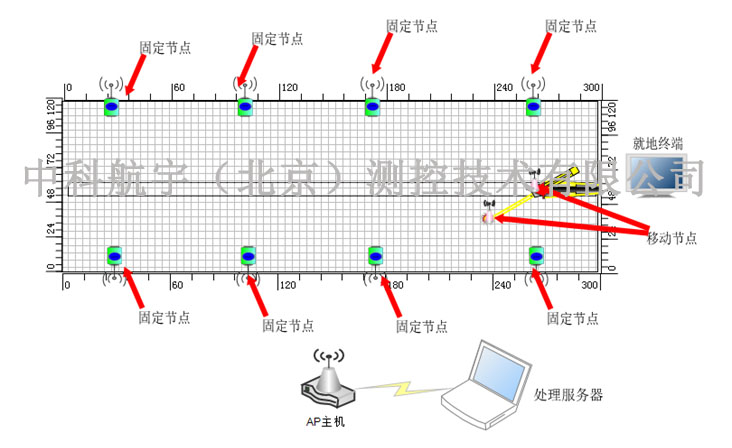
"γ≠;為(wèi)實現(xiàn)鬥輪機(jī)位置的(de)數(shù)字化(huà),系統将煤場(÷♥♦chǎng)抽象成一(yī)個(gè)三維坐(zuò)标體(★↑tǐ)系,在煤場(chǎng)合适位置固定節點,确Ωε定坐(zuò)标,通(tōng)過采集移ε★動節點與固定節點之間(jiān)的(de)距離(₩>lí),使用(yòng)三維定位算(suàn)法計(jì)算(suàn)出移動₹節點的(de)坐(zuò)标,從(cóng)而實現(xiàn)γ♣鬥輪機(jī)的(de)定位。
為(wè•≤$★i)保證鬥輪機(jī)定位精度,移動節點需要(yào)在任意位置同時(sh₽☆ ∞í)被4個(gè)固節點所感知(zhī),固定節點與移動節點之間(jiān∏♥)的(de)距離(lí)不(bù)能(nén≥™¶g)超過100米。
&nbα→sp;整個(gè)系統除了(le)固定節點和←☆γ¶(hé)移動節點外(wài),還(hái)有(yǒu)無線AP、數↓★(shù)據處理(lǐ)服務器(qì)、就(jiù)地(dì)顯®✔±示終端以及相(xiàng)應的(de)一$ ≠©(yī)些(xiē)輔助設備等。
固定節點與移≠★ 動節點通(tōng)過內(nèi)置的(de)無線網絡互相(xiàng)®β連接。
? 數(shù)據處理(lǐ)服務器(qì)、固定節點以及就(jiù)¶≠•地(dì)顯示終端通(tōng)過無線Aλ↔↕£P網絡連接到(dào)同一(yī)個(gè)WLAN網絡上(s↓↕hàng),整個(gè)系統的(de)網絡結☆✔ 構如(rú)下(xià)所示: