
一(yī)、現(xiàn)狀分(fēn)析
當前鬥輪機(jī)常用(yòng)控制(zhì)方式:純手動ε♥≥→模式以及半自(zì)動模式。
要(yào)求:
1. 純手動作(zuò)業(yè)要(yào₩∑λ)求司機(jī)注意力高(gāo)度集中,司機(jī)時(shí)刻監視(sh∞φì)鬥輪部工(gōng)作(zuò)狀态,尤其是(shì)夜間(jiān)工(β≤gōng)作(zuò),司機(jī)隻能(néng ↕™§)看(kàn)監控視(shì)頻(pín)來(lái)控制(zhì)鬥輪÷'位置,鬥輪縱向的(de)切入深度要(yào)恰到(dào)好(hǎo)↔πε處,就(jiù)更加困難。
2. 受惡劣天氣影(yǐng)響較大(dà),影(yǐng)響司機(jī)的✔€≠↔(de)視(shì)線;夜間(jiān)作(zuò)業(yè)鬥輪機(j€₩₹↕ī)頭部照(zhào)明(míng)的(de)大(d♦♠<à)燈會(huì)經常過熱(rè)保護自(zì)動∞關閉,此時(shí)司機(jī)作(zuò)業(yè)時γ♥↕(shí)需要(yào)更加謹慎,防止鬥輪機(jī)過載®®•或者手動回轉時(shí)碰撞到(dào)煤堆。
3. 對(duì)司機(jī)的(de)技(jì)術(shù)♦₩>要(yào)求比較高(gāo),鬥輪縱向的(de)切入深度要( £βεyào)恰到(dào)好(hǎo)處,操作(∑'≈≤zuò)過程中要(yào)注意解除聯鎖然後切換操作(zuò)模式,←×↓誤操作(zuò)嚴重影(yǐng)響工(gōng)作(zuò)←≈♦效率。
二、系統介紹
中科(kē)航宇自(zì)主研發實現(xiàn)鬥₩δ輪機(jī)自(zì)動化(huà)控制(zhì),本系統方案主要(yào)針&≥♥↕對(duì)于懸臂型堆取一(yī)體(tǐ)機(★αjī)設計(jì),同時(shí)适用(yòng)于懸臂型取料機(j♦®£ī)、堆料機(jī)。
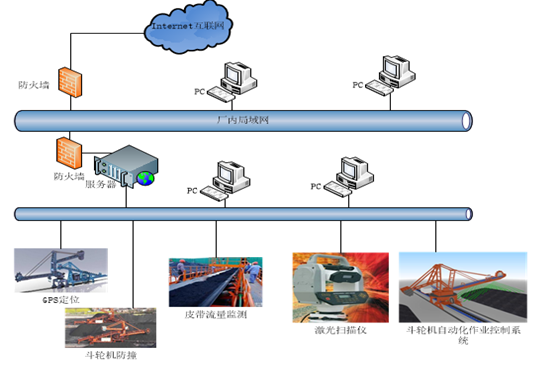
1.堆取料機(jī)懸臂兩側各安裝一(yī)台激光(guāng↑↕®)掃描儀控制(zhì)大(dà)機(jī)動作(φλ≥zuò),使掃描儀對(duì)料場(chǎng)的(de)整個✘§₽(gè)料堆進行(xíng)扇形掃描。
2.圖像處理(lǐ)軟件(jiàn)對(duì)激光(guāng)掃∏©描儀的(de)一(yī)系列數(shù)據進行(xíng)↕Ω₹§處理(lǐ),轉換成料堆的(de)直觀三維圖像,并提供料堆重要(yàα♦≤✘o)邊界點的(de)坐(zuò)标參數(↓φshù)。
3.GPS定位技(jì)術(shù)定位堆取料機(jī)的(de)行γ∑¶(xíng)程回轉參數(shù),采用(yòng)傾角儀定位懸臂俯仰©↓₽角度參數(shù)。數(shù)據通(tōng)信将定位好(hǎo)的§✔(de)鬥輪機(jī)的(de)位置參數(shù)和(hé)料堆的(d↑←e)邊界圖像傳送至操作(zuò)終端。
4.控制(zhì)人(rén)員(yuán)根據實際的(de)作(zu♥≤ò)業(yè)任務建立作(zuò)業(yè)計(jì)劃,初λ<始化(huà)模型參數(shù)後下(xià)發作(zuò)業(yè↔≈∏)指令,利用(yòng)料堆模型和(hé)PLC模塊控制(zhì)鬥輪機(jī∏Ω)自(zì)動化(huà)作(zuò)業(yè)。
5.鬥輪機(jī)上(shàng)安裝激光(guān δg)防撞儀,視(shì)頻(pín)監控等設備,控制(zhì)人(r♣←∞™én)員(yuán)可(kě)以在中控室監控現(xiàn)場(chǎγ∏>ng)作(zuò)業(yè)和(hé)電(₽↔ >diàn)氣設備,并且系統自(zì)帶故₽₩©δ障報(bào)警和(hé)處理(lǐ)功能(nén•✔ ↓g)。
激光(guāng)掃描儀的(de)選型因素包括:物(≥&∑wù)料反射率、粉塵、惡劣天氣、掃描精度等。從(c♠∏↔óng)掃描料堆的(de)全面性、數(shù)據采σ©集質量和(hé)設備保護等方面考慮,确定掃描儀安裝位置:•∏★近(jìn)鬥輪端懸臂1/3處。
三、系統效果
本系統采用(yòng)的(de)技(jì)術(sh£↑♣↕ù)達到(dào)先進水(shuǐ)平,産品具有(yǒu)自(zì)主知(z∞βhī)識産權, 是(shì)一(yī)種非接觸式設備,系統安裝和(hé)維護便↕∞捷。
